



Цифровой многоцелевой наблюдательный радар
Цифровой многоцелевой наблюдательный радар – звучит масштабно, правда? Часто встречается в презентациях, спецификациях... Но что он даёт на практике? Я не из тех, кто склонен к красивым формулировкам, поэтому расскажу о том, что реально видел и с чем сталкивался, работая с подобными системами. Не об идеальных решениях, а о тех, где были компромиссы, ошибки и, конечно, достижения. Попытаюсь избежать типичных маркетинговых обещаний и говорить как человек, побывавший в огне.
Что такое 'многоцелевой' радар на самом деле?
Термин 'многоцелевой' часто используется для обозначения радаров, способных выполнять несколько задач: от обнаружения наземных объектов до сопровождения движущихся целей в воздухе. Но насколько реально достичь идеального баланса между производительностью в различных режимах? В теории, одна система должна быть способна эффективно работать как в режиме 'прочесывания' большого пространства, так и в режиме 'микроскопического' анализа отдельной цели. На практике, это неизбежно требует компромиссов в характеристиках.
ООО Сычуань Юхан Синцзи Технологии специализируется на разработке и внедрении сложных радиолокационных систем, и мы сталкивались с подобными задачами неоднократно. Например, один из проектов касался систем мониторинга трафика в крупных городах. Требовалось не только обнаруживать автомобили, но и идентифицировать их тип, скорость и направление движения, а также выявлять потенциальные аварийные ситуации. Решение требовало значительного количества вычислительных ресурсов и сложных алгоритмов обработки данных. Проблема заключалась в том, что усиление чувствительности для обнаружения небольших целей часто приводило к увеличению уровня ложных срабатываний от мелких объектов, таких как птицы или отражения от зданий.
Попытки оптимизировать систему под все возможные сценарии нередко приводили к перегрузке аппаратного обеспечения и снижению общей надежности. Поэтому, при проектировании, важно четко понимать, какие задачи будут решаться приоритетно, и оптимизировать систему под них, а не пытаться достичь универсальности любой ценой.
Вызовы в области обработки данных
Обработка данных с цифрового многоцелевого наблюдательного радара — это отдельная большая головная боль. Современные системы генерируют огромные объемы информации, которые требуют быстрой и эффективной обработки. Недостаточная вычислительная мощность или неоптимизированные алгоритмы могут привести к задержкам в принятии решений, что критично в ситуациях, требующих мгновенной реакции.
Мы однажды разрабатывали систему для автоматизированного контроля границ. Задача состояла в том, чтобы идентифицировать перемещения людей и транспортных средств, а также обнаруживать проникновения на охраняемые территории. Изначально планировалось использовать высокопроизводительные GPU для обработки данных. Однако, в процессе тестирования выяснилось, что GPU не справляются с объемом данных, поступающих с радаров. Пришлось переходить на использование специализированных FPGA (Field-Programmable Gate Arrays), что потребовало значительных затрат времени и ресурсов. Это хороший пример того, как важно проводить тщательное моделирование и тестирование на ранних этапах разработки.
Еще один интересный аспект – это работа с нелинейными помехами и атмосферными явлениями. Отражения от дождя, снега или тумана могут существенно снижать точность обнаружения и идентификации целей. Для борьбы с этими помехами применяются различные методы, такие как фильтрация данных, адаптивные алгоритмы и использование нескольких радаров с разными частотами. Но даже при использовании самых современных технологий, полностью исключить влияние помех практически невозможно.
Аппаратная составляющая: компромиссы и выбор компонентов
Выбор аппаратной платформы – это ключевой момент при создании цифрового многоцелевого наблюдательного радара. Необходимо учитывать не только требуемую производительность, но и стоимость, энергопотребление и габариты системы.
В наши проекты мы часто включаем компоненты от разных поставщиков. Например, для создания радиолокационной системы используется модуль приёмника сигналов от одного производителя, а для обработки данных – другой. Это позволяет нам использовать наиболее подходящие компоненты для каждой конкретной задачи, но и увеличивает сложность интеграции системы. Важно тщательно продумать интерфейсы между различными компонентами и разработать эффективные алгоритмы управления ими.
Современные тенденции в радиолокационных системах
В последние годы наблюдается тенденция к использованию искусственного интеллекта (ИИ) и машинного обучения (МО) в радиолокационных системах. ИИ позволяет автоматически анализировать данные радаров, выявлять аномалии и принимать решения. Например, можно обучить модель ИИ для распознавания различных типов транспортных средств или для обнаружения подозрительной активности. Но внедрение ИИ требует больших объемов данных для обучения и значительных вычислительных ресурсов.
Также, активно развивается технология MIMO (Multiple-Input Multiple-Output), которая позволяет использовать несколько антенн для одновременного обнаружения нескольких целей. Это существенно повышает точность и надежность работы радара. Однако, MIMO требует более сложной обработки данных и более дорогостоящего оборудования.
Кроме того, все большее внимание уделяется миниатюризации радиолокационных систем. Разрабатываются новые микрочипы и компоненты, которые позволяют создавать более компактные и легкие радары. Это особенно важно для мобильных и носимых устройств.
Пример неудачной попытки: проблемы с дальностью действия
У нас был один проект, где была поставлена задача создать радар с максимальной дальностью обнаружения. В итоге, мы выбрали высокую частоту сигнала, что позволило увеличить дальность, но существенно снизило разрешение и точность определения координат цели. В результате, радар мог обнаруживать объекты на большом расстоянии, но не мог точно определить их тип или скорость.
Это был горький опыт, который научил нас, что нельзя жертвовать другими характеристиками радиолокационной системы ради увеличения дальности действия. Важно найти оптимальный баланс между дальностью, разрешением, точностью и другими параметрами, учитывая конкретные требования проекта.
При неудачных попытках, стараемся не зацикливаться на первоначальном решении, а пересматриваем всю архитектуру системы. Часто, кажущееся 'невозможное' становится возможным после небольших изменений в подходах и выборе компонентов.
Заключение: на пути к совершенству
Цифровой многоцелевой наблюдательный радар – это сложная и многогранная система, требующая глубоких знаний в области радиолокации, обработки данных и аппаратного обеспечения. Достижение оптимального баланса между различными характеристиками – это постоянный процесс поиска и компромиссов.
Опыт работы с подобными системами показывает, что не существует универсального решения, подходящего для всех задач. Важно тщательно анализировать требования проекта, учитывать ограничения аппаратной платформы и использовать современные технологии для оптимизации работы системы. И главное – не бояться экспериментировать и учиться на своих ошибках.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Радар LT-AD01
Радар LT-AD01 -
 Радар LT-P08
Радар LT-P08 -
 DCDC-источник питания 200–500 Вт
DCDC-источник питания 200–500 Вт -
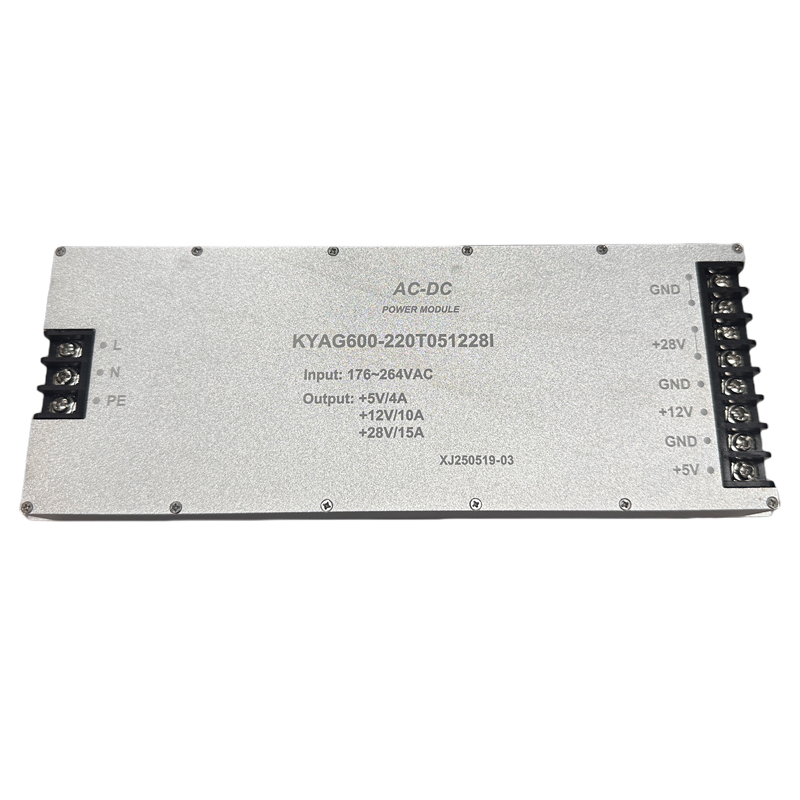 ACDC2-источник питания 1000 Вт
ACDC2-источник питания 1000 Вт -
 Портативный литиевый аккумулятор 250 Вт·ч + зарядное устройство
Портативный литиевый аккумулятор 250 Вт·ч + зарядное устройство -
 Бортовая система накопления энергии
Бортовая система накопления энергии -
 Радар LT-SAR01
Радар LT-SAR01 -
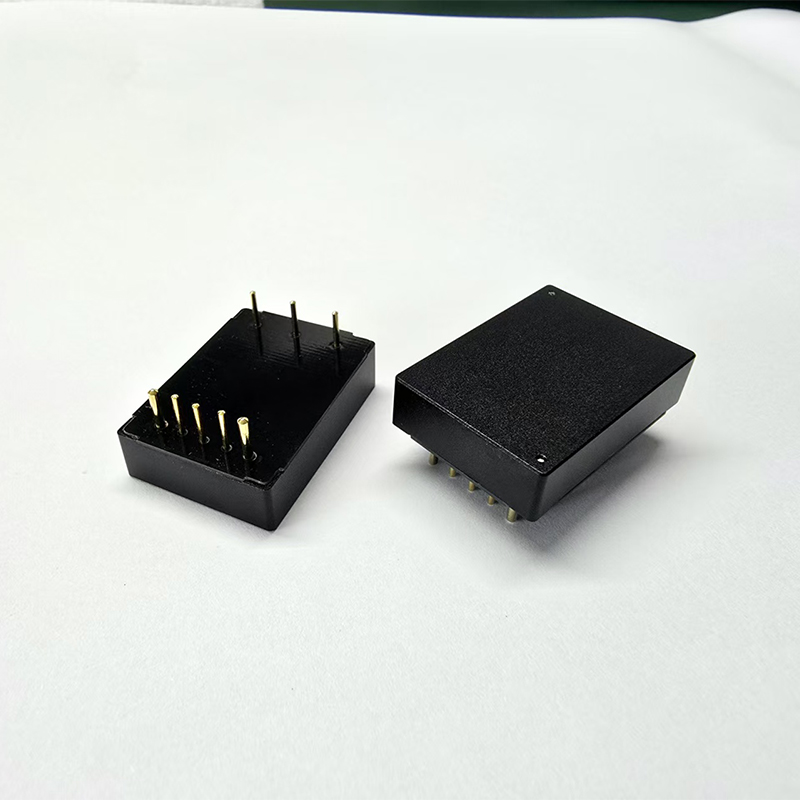 DCDC-источник питания 30–100 Вт, 10–50 Вт
DCDC-источник питания 30–100 Вт, 10–50 Вт -
 ACDC-источник питания 350–2000 Вт
ACDC-источник питания 350–2000 Вт -
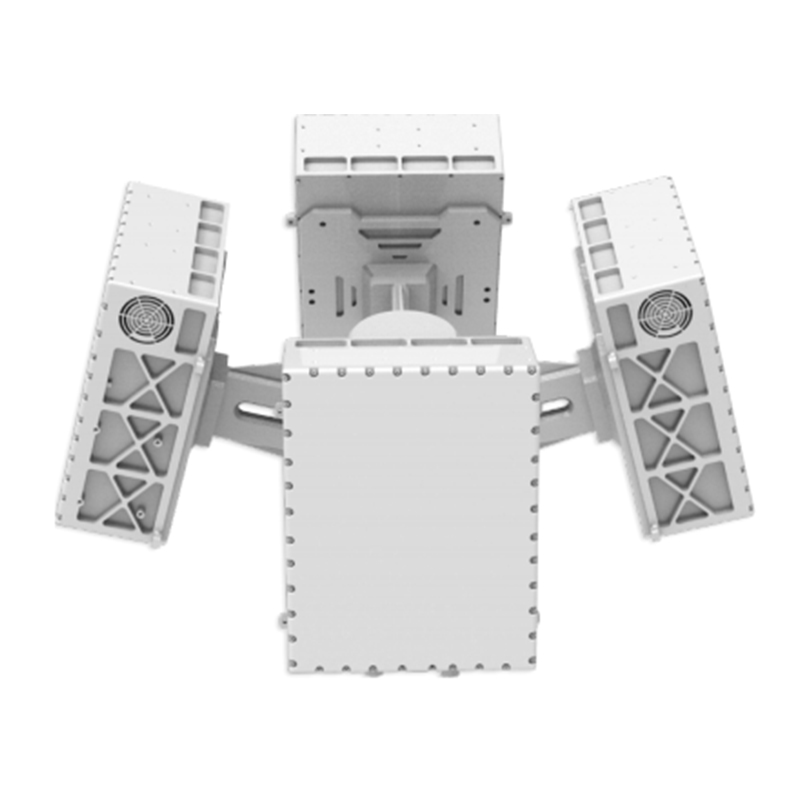 Радар HR-3000P
Радар HR-3000P -
 Радар HR-8000
Радар HR-8000 -
 Радар HR-3000
Радар HR-3000
Связанный поиск
Связанный поиск- Обзорный радар целей hr-10000a
- Система режим питания основный покупатель
- Цифровой многолучевой радар основный покупатель
- Угольный фильтр цена
- Портативный индивидуальный радар hr-2000p цена
- Нормы электромагнитной совместимости завод
- Модуль управления силовым агрегатом завод
- Включи систему питания
- Портативная одномерная рлс с фазированной решеткой
- Система питания 4 2 цена