



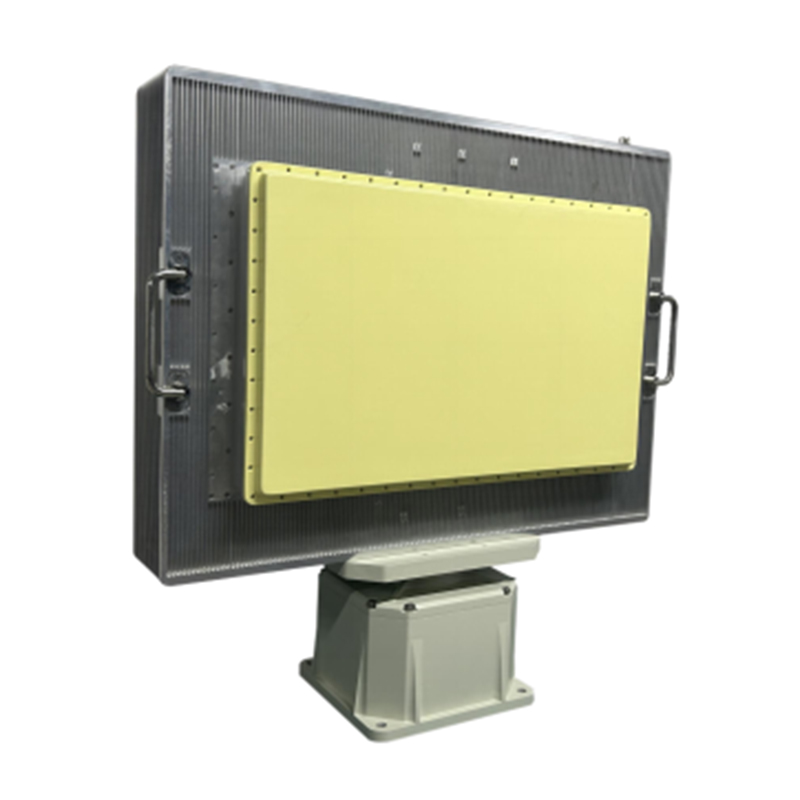
Обзорный радар целей hr-6000 fpv
Итак, обзорный радар целей hr-6000 fpv. Сразу скажу, что этот сегмент рынка сейчас переживает не какой-то уж глобальный прорыв, скорее – аккуратное, но уверенное развитие. Часто попадаются завышенные ожидания, особенно у тех, кто только начинает осваивать дроны. Многие видят в них универсальный инструмент для всего – от поисково-спасательных операций до мониторинга инфраструктуры. Реальность, как обычно, немного сложнее. В этой статье я постараюсь поделиться своим опытом работы с подобными системами, выявить ключевые моменты, на которые стоит обратить внимание, и рассказать о тех подводных камнях, которые можно встретить. Не обещаю идеальной картины, скорее – честный взгляд, основанный на практике.
Предварительный анализ: что такое обзорный радар и зачем он нужен?
Прежде чем углубиться в детали конкретной модели, стоит понять, что такое обзорный радар и чем он отличается от простых систем обнаружения препятствий. Радар, в отличие от ультразвуковых датчиков или камер, не зависит от освещения и погодных условий. Это критически важно для задач, требующих работы в сложных условиях – ночное наблюдение, туман, дождь. Основная задача – определение дальности, скорости и направления движения объектов, как правило, это летательные аппараты, но могут быть и наземные цели. Применение обзорных радаров расширяет спектр возможностей дрона, делая его применимым в ситуациях, где другие сенсоры не справляются. Мы в ООО Сычуань Юхан Синцзи Технологии часто сталкиваемся с запросами на интеграцию подобных систем для задач наблюдения за протяженными объектами – трубопроводами, линиями электропередач. Это особенно ценно при необходимости круглосуточного мониторинга.
Несмотря на очевидные преимущества, существуют и ограничения. Во-первых, обзорный радар, как правило, дороже, чем аналогичные системы на базе камер или ультразвука. Во-вторых, требуется определенный уровень квалификации оператора для интерпретации данных радара. Недостаточно просто увидеть точку на экране – нужно понимать, что она означает, как быстро объект приближается, и как правильно выбрать параметры радара для оптимального обнаружения. И, конечно, необходимо учитывать помехи. Радиопомехи от других электронных устройств, особенно в городских условиях, могут существенно ухудшить характеристики радара. В нашей практике, часто приходится проводить предварительные измерения на местности, чтобы подобрать оптимальные настройки и определить зоны повышенной помеховой обстановки.
Основные технические характеристики и их значение
При выборе обзорного радара необходимо обращать внимание на несколько ключевых параметров. Первый – это дальность обнаружения. Обычно указывают максимальную дальность, но реальная дальность может быть значительно меньше из-за отражающих поверхностей и других факторов. Второй – это разрешение. Чем выше разрешение, тем точнее радар может определить размеры и форму объекта. Третий – это частота повторения сканирования. Чем выше частота, тем быстрее радар обновляет данные о местоположении объекта. И, наконец, важно учитывать угол обзора. Слишком узкий угол обзора может привести к пропуску объектов, движущихся под другим углом. Например, для мониторинга линий электропередач критична широкая область обзора.
Особенно важно понимать, что заявленные характеристики часто немного отличаются от реальных. Мы, например, однажды заказывали дрон с 'максимальной дальностью обнаружения 10 километров', а в реальных условиях дальность составляла около 5 километров, и то при идеальных условиях. В таких случаях необходимо учитывать запас по дальности и предусмотреть возможность использования дополнительных сенсоров для подтверждения информации. При проектировании комплексной системы, включающей обзорный радар, следует продумать алгоритм обработки данных с разных сенсоров для повышения надежности и точности.
Типы радаров и их особенности
Существуют разные типы радаров, используемых в дронах. Наиболее распространенные – это FMCW (Frequency Modulated Continuous Wave) и pulsed Doppler радары. FMCW радары отличаются более высокой точностью определения дальности, но могут быть более чувствительны к помехам. Pulsed Doppler радары менее точны в определении дальности, но более устойчивы к помехам и позволяют определять скорость объекта. Выбор типа радара зависит от конкретной задачи и условий эксплуатации. В нашем случае, для задач наблюдения за инфраструктурой, мы чаще используем pulsed Doppler радары, поскольку они более надежны в условиях радиопомех.
Некоторые производители предлагают радары с функцией автоматического отслеживания целей. Это может быть полезно для автоматизации процессов наблюдения и снижения нагрузки на оператора. Однако, стоит учитывать, что автоматическое отслеживание не всегда является надежным, особенно в сложных условиях. В ряде случаев, лучше доверить отслеживание целей оператору, который может более эффективно интерпретировать данные радара и принимать решения. Кроме того, необходимо учитывать, что системы автоматического отслеживания часто потребляют больше энергии, что может сократить время полета дрона.
Практические примеры использования обзорных радаров
Мы реализовывали несколько проектов, где обзорные радары сыграли ключевую роль. Один из примеров – мониторинг состояния железнодорожных путей. Дрон, оснащенный обзорным радаром и камерой, совершал регулярные облеты участка пути, фиксируя дефекты рельсов и шпал. Благодаря радару, дрон мог видеть дефекты даже при плохой видимости – тумане или дожде. Второй пример – поиск пропавших людей в лесистой местности. Радар помог оперативно определить местоположение человека, даже если он находился в густом лесу и не мог быть виден с земли или с воздуха. Это существенно сократило время поисково-спасательной операции.
Нам также приходилось использовать обзорные радары для мониторинга нефтегазовых трубопроводов. Радар позволял оперативно обнаруживать утечки газа и разливы нефти, что позволяет предотвратить серьезные экологические катастрофы. В этих проектах мы использовали различные модели радаров, от бюджетных до профессиональных. Выбор конкретной модели зависел от требований к дальности обнаружения, точности и надежности. Важным аспектом при интеграции радара в дрон является разработка удобного интерфейса для отображения данных на экране оператора. Это позволяет оператору быстро и эффективно принимать решения.
Проблемы и трудности при эксплуатации обзорного радара
Несмотря на все преимущества, эксплуатация обзорного радара связана с определенными проблемами и трудностями. Одна из основных – это помехи. Радиопомехи от других электронных устройств могут существенно ухудшить характеристики радара и привести к ложным срабатываниям. Для борьбы с помехами необходимо использовать фильтры и другие методы подавления помех. Вторая проблема – это высокая стоимость обслуживания. Радары требуют регулярной калибровки и настройки, а также периодической замены компонентов. Стоимость обслуживания может значительно увеличить общую стоимость владения дроном. Третья проблема – это необходимость обучения операторов. Для эффективной работы с обзорным радаром требуется определенный уровень квалификации и опыта.
Мы сталкивались с ситуацией, когда дрон, оснащенный обзорным радаром, постоянно выдавал ложные срабатывания из-за помех от мобильной связи. Для решения этой проблемы, мы использовали специальный фильтр, который подавлял помехи от мобильной связи. Также, мы разработали алгоритм, который отфильтровывал ложные срабатывания на основе анализа данных радара и других сенсоров. В заключение, хочу сказать, что обзорный радар – это перспективная технология, которая может существенно расширить возможности дронов. Однако, для эффективной эксплуатации необходимо учитывать все особенности и трудности, связанные с его использованием.
Будущее обзорных радаров для дронов
На рынке постоянно появляются новые модели обзорных радаров с улучшенными характеристиками. Ожидается, что в будущем радары станут более компактными, легкими и энергоэффективными. Также, стоит ожидать появления радаров с функцией искусственного интеллекта, которые смогут автоматически обнаруживать и идентифицировать объекты. Развитие технологий обработки данных и машинного обучения позволит повысить точность и надежность обзорных радаров, а также упростить их эксплуатацию. ООО Сычуань Юхан Синцзи Технологии следит за последними тенденциями в этой области и активно внед
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Аккумулятор для БПЛА
Аккумулятор для БПЛА -
 Радар LT-P08
Радар LT-P08 -
 Источник питания для накопителей энергии
Источник питания для накопителей энергии -
 Литий-ионный аккумулятор для индивидуального использования
Литий-ионный аккумулятор для индивидуального использования -
 Фильтр 30~300 Вт
Фильтр 30~300 Вт -
 Радар HR-3000
Радар HR-3000 -
 Радар LT-SAR01
Радар LT-SAR01 -
 ACDC-источник питания 350–2000 Вт
ACDC-источник питания 350–2000 Вт -
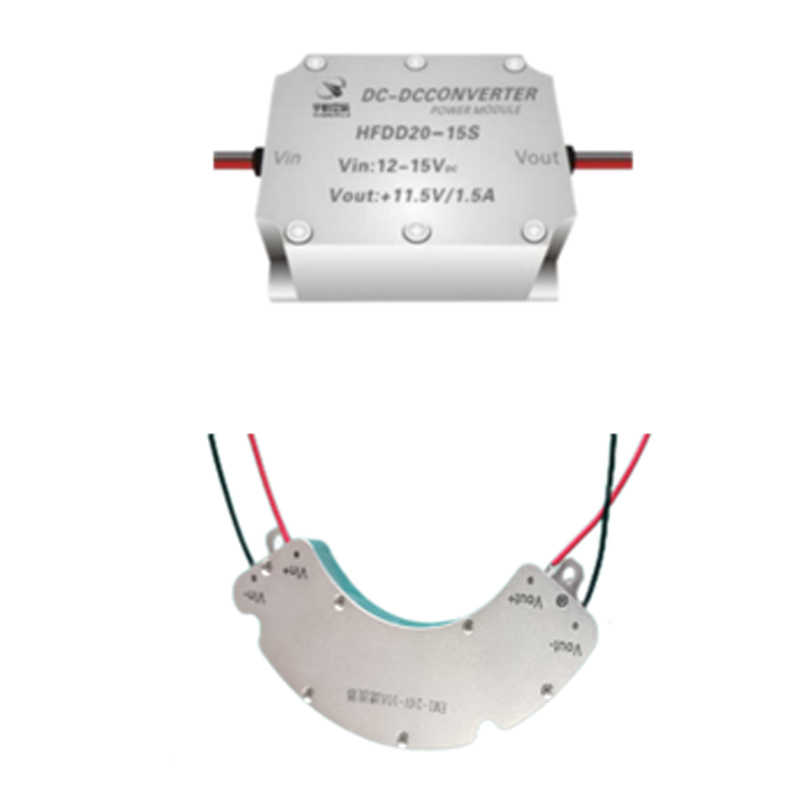
 DCDC-источник питания 30–100 Вт, 10–50 Вт
DCDC-источник питания 30–100 Вт, 10–50 Вт -
 Модульная система накопления энергии
Модульная система накопления энергии -
 Бортовая система накопления энергии
Бортовая система накопления энергии -
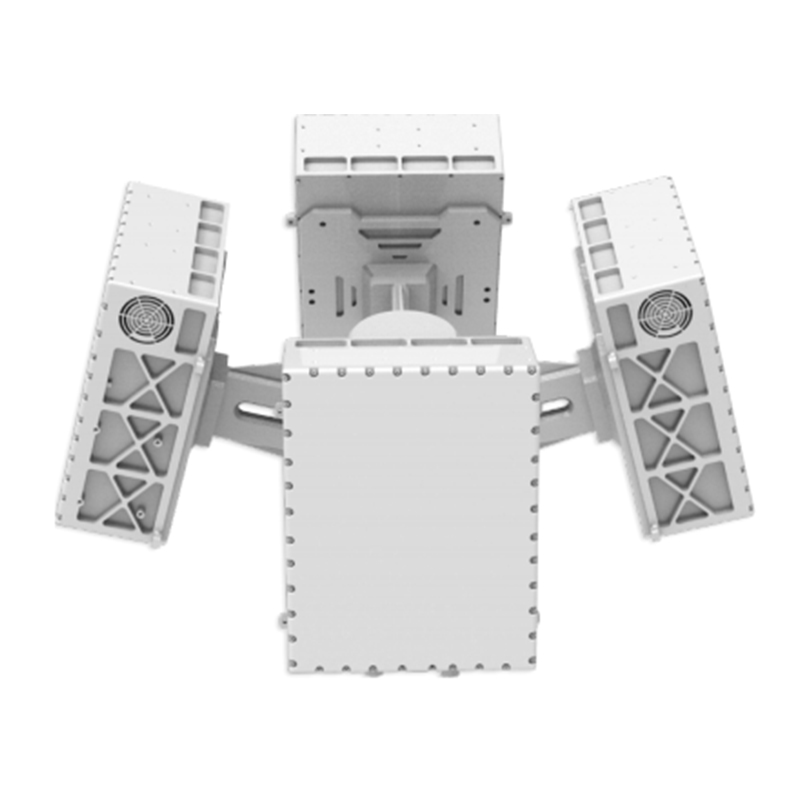
 Радар HR-6000
Радар HR-6000
Связанный поиск
Связанный поиск- Сколько фильтров завод
- Сколько фильтров цена
- Тр электромагнитная совместимость цена
- Радар наклона lt-sar01 цена
- Акб литий фосфат железо
- Питание систем противопожарной защиты поставщики
- Программируемый импульсный источник питания производители
- Схема силового модуля основный покупатель
- Технический регламент электромагнитная совместимость поставщик
- Работа импульсного источника питания